Puebla, Puebla. (Agencia Informativa Conacyt).- Estudiantes del noveno semestre de la carrera de ciencias de la computación de la Benemérita Universidad Autónoma de Puebla (BUAP) diseñaron un prototipo para separar basura mediante el procesamiento de imágenes y reconocimiento de patrones.
Con este proyecto, Enrique Espinoza Monroy, Abdiel Tlapale Pérez, Areli Romero Jiménez y Elia Tecotl Aguilar ganaron el tercer lugar en la categoría de software avanzado en la Feria de Proyectos (Fepro 2016), organizada por la Facultad de Ciencias de la Computación de la BUAP, bajo la asesoría del doctor David Eduardo Pinto Avendaño, director del Laboratorio de Ingeniería del Lenguaje y del Conocimiento.
“Lo que nos impulsó a crear este proyecto fueron las grandes cantidades de basura que a diario se producen, guiándonos por esta problemática del poco aprovechamiento que hay del reciclaje, decidimos crear un separador de basura por procesamiento de imágenes y reconocimiento de patrones”, indicó en entrevista Elia Tecotl Aguilar.
Para iniciar con este proyecto, los integrantes del equipo eligieron las latas como primer elemento programado para ser reconocido por el software; no obstante, aseguraron que se puede extender a otro tipo de desechos como PET, cartón, papel, etcétera.
El funcionamiento interno
El software utilizado reconoce los colores mediante un sistema HSV (del inglés hue, saturationy value), también llamado HSB, que permite definir un modelo de color en términos de sus componentes.
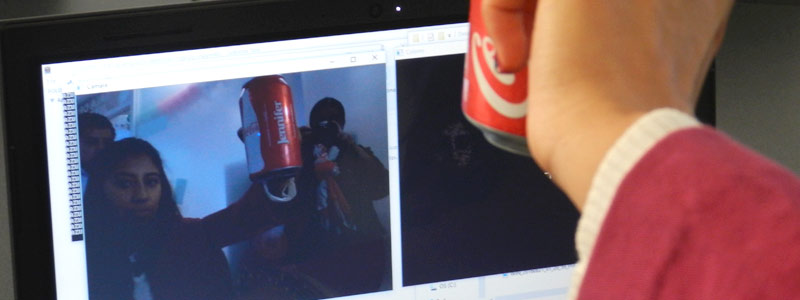
 “Utilizamos los valores de matiz, saturación y brillo para definir qué colores pueden representar a una lata. En el programa, nosotros establecimos un rango de colores y brillo que se asocien a las formas y colores de lo que sería un desecho de este tipo. Así es como el programa detecta por ejemplo rojos, en un promedio mayor a los 600 pixeles”, explicó Abdiel Tlapale Pérez.
“Utilizamos los valores de matiz, saturación y brillo para definir qué colores pueden representar a una lata. En el programa, nosotros establecimos un rango de colores y brillo que se asocien a las formas y colores de lo que sería un desecho de este tipo. Así es como el programa detecta por ejemplo rojos, en un promedio mayor a los 600 pixeles”, explicó Abdiel Tlapale Pérez.
Al establecer un rango de pixeles, la cámara, situada en un lugar estratégico del contenedor, se activará en el momento que se coloque un residuo y si el rango de color del objeto detectado es mayor a 600 pixeles, la cámara traduce que el desecho tiene un volumen suficiente y similar al de una lata.
Con esta información, en otra pantalla se dibuja el punto medio del objeto, para establecer coordenadas que permitan ubicar su posición y este pueda ser tomado por una pinza para ser colocado en el contenedor adecuado.
En cuanto al brazo robot, los estudiantes refieren que aún no está diseñado; sin embargo, confían en que partirán de un modelo básico que incluya una extensión articulada capaz de realizar seis movimientos: izquierda-derecha, arriba-abajo, abrir y cerrar.
El reconocimiento de patrones
La otra parte del proyecto es el reconocimiento de patrones, ejecutado a través del lenguaje de programación Python y librerías adicionales como la Open CV, lo que permitió la implementación de imágenes en la cámara.
“El reconocimiento de patrones prácticamente se saca de las características del objeto, en este caso de la lata, y así el sensor lo va comparando en tiempo real”, añadió Enrique Espinoza Monroy, quien reconoció que uno de los contratiempos con los que se toparon fue la recopilación de imágenes para el reconocimiento de patrones, ya que las condiciones en las que se tira este desecho son variadas.
“Para el reconocimiento de patrones usamos un clasificador, el cual se entrena con una cantidad considerable de imágenes que se le proporcionan al programa para que pueda reconocer las partes y contornos similares a los de una lata”, indicó Espinoza Monroy.
Finalmente, el equipo aseguró que trabaja en el ajuste de las funciones del software, a fin de que esté listo antes de enero para que puedan planificar el prototipo de pinza o brazo robot, ya que su plan para este proyecto es presentarlo en la Copa Intel que se llevará a cabo en marzo de 2017.
AUTOR: Dalia Patiño González
FUENTE: AGENCIA INFORMATIVA CONACYT